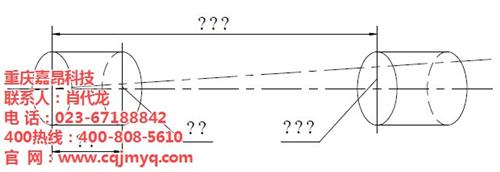
三坐标旋转测座校正的方法 在安装三坐标旋转测座时,可能安装位置会有一些偏差,这会影响测头转换角度后自动校正的进行。所以安装测座后要进行测座校正。三坐标旋转测座校正的方法如下: 1) 在测座0,0角度时用测杆找一个参照点。 2) 锁定横向移动轴,使之在使用操纵杆时不能运动。 3) 将测座转到90,0角度。 4) 用操纵杆控制机器运动另外两个轴,用测杆找参照点。如果左右位置与参照点有偏差,则松开测座固定螺钉,调整测座使测杆对正参照点。 5) 固定测座。 重庆嘉昂科技有限公司(www.cqjmyq.com)是一家专业提供三坐标测量机技术服务、产品尺寸检测服务、产品扫描与逆向工程服务、机床精度校验服务的专业化服务公司 三坐标测量仪重定位整合原理 工件移动(重定位)后的测量数据与移动前的测量数据存在着移动错位,如果我们在工件上确定一个在重定位前后都能测到的形体(称为重定位基准),那么只要在测量结束后,通过一系列变换使重定位后对该形体的测量结果与重定位前的测量结果重合,即可将重定位后的测量数据整合到重合前的数据中。重定位基准在重定位整合中起到了纽带的作用. PID控制是:比例,积分,微分控制的缩写。 P参数:决定系统对位置误差的整个响应过程。数值越低,系统越稳定,不产生振荡,但刚性差,到位误差大;数值越高,刚性越好,到位误差小,但系统可能产生振荡。 I 参数:控制由于摩擦力和负载引起的静态到位误差。数值越低,到位时间越长;数值越高,可能在理论位置上下振荡。 D参数:此参数通过阻止误差变化过冲给系统提供阻尼和稳定性。数值越低,使系统对位置误差响应快;数值越高,系统响应越慢。 重庆嘉昂科技有限公司(www.cqjmyq.com)是一家专业提供三坐标测量机技术服务、产品尺寸检测服务、产品扫描与逆向工程服务、机床精度校验服务的专业化服务公司 三坐标算法计算误差引起的测量误差 三坐标测量机构造测量元素所依赖的最little二乘法是以概率统计为基础的,要求采样的特征点数达到一定的数量。当采样点数过少时,构造所得的测量元素随机性 较大,从而导致测量结果的不确定度变大。当采样点数过多时,将会较大程度地引入三坐标测量机的系统误差,同时使得测量过程厄长繁琐。 基准轴线与被测轴线的长度与相互间距离引起的误差放大。这是最有争议的一项误差。例如有两个短圆柱(如图2所示),其中一个作基准圆柱,另一个作 被测圆柱,在基准圆柱上测量两个截面圆,其连线作基准轴线。同时被测圆柱上也测量两个截面圆,构造一条直线,然后计算同轴度。假设基准上两个测量截面的距 离为很小,基准截面与被检first截面之间的距离很大,根据三角形相似的原理,很明显原先在基准轴线上的较小误差(5μm)被放大成了一个很大的误差 (50μm)。这一测量结果显然不能真实反映零件的情况。first 重庆嘉昂科技有限公司(www.cqjmyq.com)是一家专业提供三坐标测量机技术服务、产品尺寸检测服务、产品扫描与逆向工程服务、机床精度校验服务的专业化服务公司 


09
09
2021
江津区三坐标维修,重庆嘉昂科技,三坐标维 三坐标维修精度校 蔡司三坐标维修 海克斯康三坐标维
来源:[重庆嘉昂科技有限公司]
联系人:肖先生
手机:13996087680
电话:023-67188842
传真:023-67188842
QQ:455388658
Email:xdl@cqjmyq.com
地址:北京北京市北京市重庆市渝北区回兴兰馨大道2号五金机电城C2-4
品牌:嘉昂科技
价格:面议
元/件
供应地:北京北京市
产品型号:CC1707
