

内丘县环保稳定PWD180-3-S1-P1从这里起航
伺服减速机的原理与应用
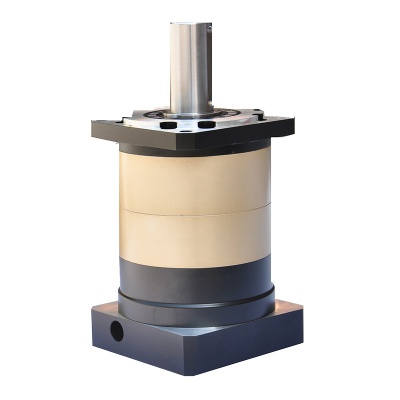
伺服减速机是一种精密的机械设备,主要用于降低电机(马达)的转速并增加扭矩,从而实现大范围、高精度的速度和位置控制。在许多高精度的位置控制应用中,例如机器人技术、数控机床、自动化装配线等,伺服减速机都有着重要的角色。
伺服减速机的工作原理
伺服减速机的主要工作原理是利用齿轮箱的结构,通过电机(马达)驱动齿轮,然后通过减速器将高转速低扭矩的旋转动力转换为低转速高扭矩的旋转动力。
其中,齿轮箱是伺服减速机的核心部分,它主要由行星齿轮、斜齿轮、蜗杆等组成。通过这些齿轮的组合和搭配,伺服减速机可以实现不同的减速比,从而满足不同的转速和扭矩需求。
而电机(马达)则是伺服减速机的动力源,它可以将电能转化为机械能,通过齿轮箱的传动,将高转速低扭矩的旋转动力转换为低转速高扭矩的旋转动力。
伺服减速机的优势
伺服减速机有许多优势,主要包括以下几点:
1. 提高扭矩和速度:通过减速机的转换,电机(马达)可以获得更大的扭矩和更高的转速,从而实现更精细的位置控制和更高的工作效率。
2. 高精度:伺服减速机的齿轮箱结构可以实现高精度的减速比,从而实现更的位置控制。
3. 稳定性好:伺服减速机的齿轮箱结构和电机(马达)的连接方式可以提供良好的稳定性,从而确保设备长时间连续工作的精度和效率。
伺服减速机的应用
伺服减速机广泛应用于各种需要高精度位置控制的领域。例如:
1. 机器人技术:在机器人技术中,伺服减速机用于降低电机(马达)的转速并增加扭矩,使机器人能够实现的位置控制和高速移动。
2. 数控机床:在数控机床中,伺服减速机用于实现工件的定位和高速切割。
3. 自动化装配线:在自动化装配线中,伺服减速机用于控制各个部件的运动和协调工作。
总的来说,伺服减速机凭借其高精度、高扭矩和稳定性,成为了现代工业自动化中不可或缺的关键设备。随着科技的进步和应用需求的提升,我们期待伺服减速机的性能将会得到进一步提升,为更多的工业应用带来更大的便利和效益。
内丘县环保稳定PWD180-3-S1-P1从这里起航

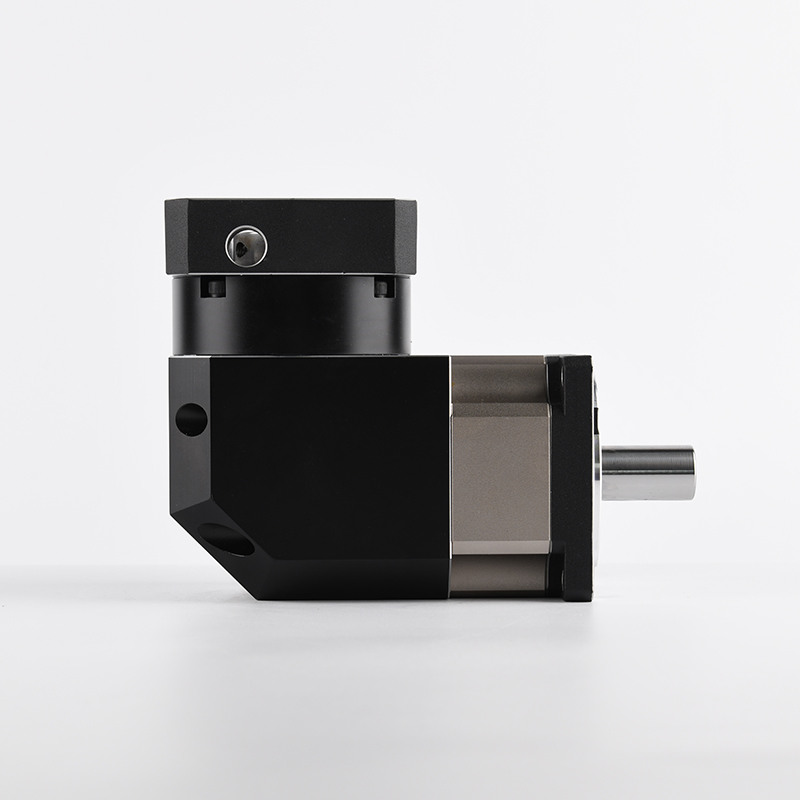
行星减速机在加工中心设备上的应用
加工中心设备是一种高精度、率的数控机床设备,广泛应用于机械制造业中。在加工中心设备上,行星减速机的作用尤为重要。本文将从以下几个方面探讨行星减速机在加工中心设备上的应用。
一、加工中心设备概述
加工中心设备是一种通过数控系统进行控制的机床设备,能够实现高精度、率的加工操作。该设备采用伺服电机驱动,通过传动装置将电机的旋转运动转化为直线运动,从而实现工件的切削加工。
二、行星减速机的优点
行星减速机作为一种高精度、率的传动装置,具有以下几个优点:
传动比大:行星减速机的传动比可达几千甚至几万,能够满足加工中心设备对高精度、率的要求。
精度高:行星减速机的传动精度可达几角分甚至几秒,能够满足加工中心设备对高精度的要求。
效率高:行星减速机的传动效率可达90%以上,能够降低加工中心设备的能耗,提高加工效率。
寿命长:行星减速机的使用寿命可达几十年甚至更长,能够满足加工中心设备长期使用的要求。
三、行星减速机在加工中心设备上的应用
驱动装置:行星减速机可以作为加工中心设备的驱动装置,将伺服电机的旋转运动转化为直线运动。通过调整行星减速机的传动比和输出转速,可以实现加工中心设备的高精度、率加工操作。
传动装置:行星减速机可以作为加工中心设备的传动装置,将驱动装置的旋转运动传递给执行机构。通过调整行星减速机的传动精度和输出扭矩,可以实现加工中心设备的高精度、率加工操作。
缓冲装置:行星减速机可以作为加工中心设备的缓冲装置,降低执行机构的运动速度和冲击力。通过调整行星减速机的减速比和输出扭矩,可以实现加工中心设备的平稳运行和控制。
四、总结
行星减速机在加工中心设备上的应用具有广泛性和重要性。通过调整行星减速机的传动比、输出转速、传动精度和输出扭矩等参数,可以实现加工中心设备的高精度、率加工操作。同时,行星减速机的寿命长、效率高、精度高等优点也能够满足加工中心设备长期使用的要求。未来随着制造业的不断发展和进步,行星减速机在加工中心设备上的应用也将更加广泛和深入。
内丘县环保稳定PWD180-3-S1-P1从这里起航

晶圆搬运机器人中使用的减速器具有以下几个特点:
1. 高精度:减速器需要提供高精度的定位和重复定位精度,以满足晶圆加工过程中对精度的严格要求。这对保持晶圆上微细图形的准确性至关重要。
2. 高刚性:为了确保机器人在运行过程中的稳定性和可靠性,减速器需要具有高刚性,以减少变形和振动对晶圆加工的影响。
3. 紧凑型设计:由于晶圆搬运机器人的空间有限,减速器通常采用紧凑型设计,以适应狭小的空间并减轻机器人的重量。
4. 低噪音:在半导体制造环境中,噪音水平需要控制在限度。因此,减速器需要低噪音运行,以确保工作环境的安静。
5. 长寿命:减速器需要具有长寿命,以减少维护需求和停机时间,提高晶圆生产的效率。
6. 良好的环境适应性:由于半导体制造环境的特殊性,减速器需要具有良好的耐腐蚀性和抗污染能力,以适应腐蚀性气体和微粒等环境因素。
7. 率:减速器需要具有率,以降低能耗并提高机器人的动态响应性能。
8. 易于维护:减速器的设计应考虑到维护的便捷性,使得日常检查、润滑和更换部件等维护工作更加容易进行。
总的来说,晶圆搬运机器人中使用的减速器需要满足高精度、高刚性、紧凑型设计、低噪音、长寿命、良好的环境适应性、率和易于维护等特点,以确保晶圆搬运的准确性和稳定性。这些特点对于保证半导体产品的质量和产量至关重要。
内丘县环保稳定PWD180-3-S1-P1从这里起航
VRB142-3-S2-P1-24-110-145-M8
VRB142-4-S2-P1-24-110-145-M8
VRB142-5-S2-P1-24-110-145-M8
VRB142-7-S2-P1-24-110-145-M8
VRB142-8-S2-P1-24-110-145-M8
VRB142-10-S2-P1-24-110-145-M8
VRB142-12-S2-P1-24-110-145-M8
VRB142-15-S2-P1-24-110-145-M8
VRB142-20-S2-P1-24-110-145-M8
VRB142-25-S2-P1-24-110-145-M8
VRB142-30-S2-P1-24-110-145-M8
VRB142-35-S2-P1-24-110-145-M8
VRB142-40-S2-P1-24-110-145-M8
VRB142-50-S2-P1-24-110-145-M8
VRB142-70-S2-P1-24-110-145-M8
VRB142-80-S2-P1-24-110-145-M8
VRB142-100-S2-P1-24-110-145-M8
VRB142-3-S2-P1-35-114.3-200-M12
VRB142-4-S2-P1-35-114.3-200-M12
VRB142-5-S2-P1-35-114.3-200-M12
VRB142-7-S2-P1-35-114.3-200-M12
VRB142-8-S2-P1-35-114.3-200-M12
VRB142-10-S2-P1-35-114.3-200-M12
VRB142-12-S2-P1-35-114.3-200-M12
VRB142-15-S2-P1-35-114.3-200-M12
VRB142-20-S2-P1-35-114.3-200-M12
VRB142-25-S2-P1-35-114.3-200-M12
VRB142-30-S2-P1-35-114.3-200-M12
VRB142-35-S2-P1-35-114.3-200-M12
VRB142-40-S2-P1-35-114.3-200-M12
VRB142-50-S2-P1-35-114.3-200-M12
VRB142-70-S2-P1-35-114.3-200-M12
VRB142-80-S2-P1-35-114.3-200-M12
VRB142-100-S2-P1-35-114.3-200-M12
07
04
2024
内丘县环保稳定PWD180-3-S1-P1从这里起航
来源:[厦门伊诗图电气有限公司销售一部]
联系人:兰先生
手机:18159894779
电话:0592-5614385
传真:0592-6013512
QQ:3425985640
Email:3425985640@qq.com
地址:福建省厦门市厦门市思明区湖滨北路31号20E室
品牌:EAMON/伊明
价格:666.00
元/台
供应地:福建省厦门市
产品型号:AB-ABR-PLF-PLE
